

Actuator Performance Data
| Rated Voltage (V) | 48 | Resolution (bit) | 17 |
| Rated Torque (Nm)(S1) | 50 | Multi-turn (YES/NO) | NO |
| Rated Torque (Nm)(S2-5min) | 80 | Communication Interface | CAN-FD |
| Peak Torque (Nm)(S2-5S) | 200 | Encoder | Dual Encoder |
| Rated Speed (rpm) | 120 | Encoder Repeatability(arcsec) | ±40 |
| Max Speed (rpm) | 120 | Driver | Integrated |
| Reduction Ratio | 24 | Approximate Weight(Kg) | 1.6 |
Motor Performance Data
| Rated Voltage (V) | 48 | Torque Constant (Nm/Arms) | 0.113 |
| Rated Torque (Nm)(S1/S2-5MIN) | 2.3/3.7 | Back EMF Constant (Vrms/Krpm) | 6.9 |
| Rated Speed (rpm) | 3,300 | Terminal Resistance (mΩ) | 82 |
| Rated Power (W)(S1/S2-5MIN) | 790/1,270 | Terminal Inductance (mH) | 0.164 |
| Rated Current (Arms)(S1/S2-5MIN) | 23/38 | Torque Ripple | ≤2% |
| Peak Torque (Nm)(S2-5S) | 8 | Number of Pole Pairs | 10 |
| Max Speed (rpm) | 3,300 | Torque to Weight Ratio (Nm/Kg) | 15.04 |
| Peak Current (Arms)(S2-5S) | 125 | Weight (g) | 532 |
| Rotor Inertia (kgcm2) | 1.25 | Insulation Class | F |
Mounting Dimension
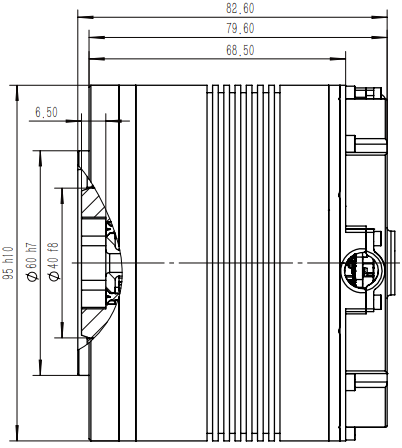
| Outer Diameter(mm) | 95 |
| Length(mm) | 82.6 |
| Housing Length(mm) | 79.6 |
| Centering Pilot (Output)(mm) | 60 |
| Hollow Shaft Diameter(mm) | 5 |
Motor Performance Curve
